Product Details
Product Positioning
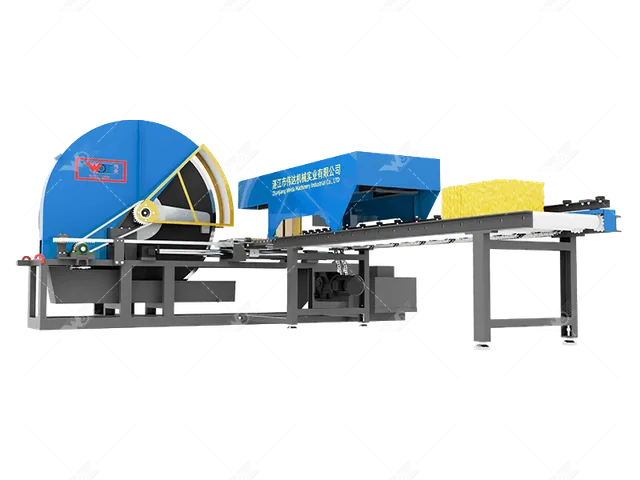
Product Positioning: In primary natural rubber processing lines, material transfer is the most labor-intensive stage. The Weida robotic arm is a highly adaptable automation terminal designed to solve physical handling pain points across different workshop stations, serving as essential equipment for modernizing rubber plants.
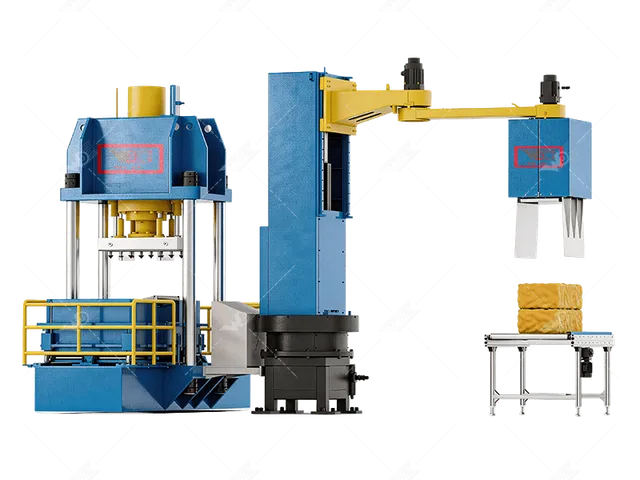
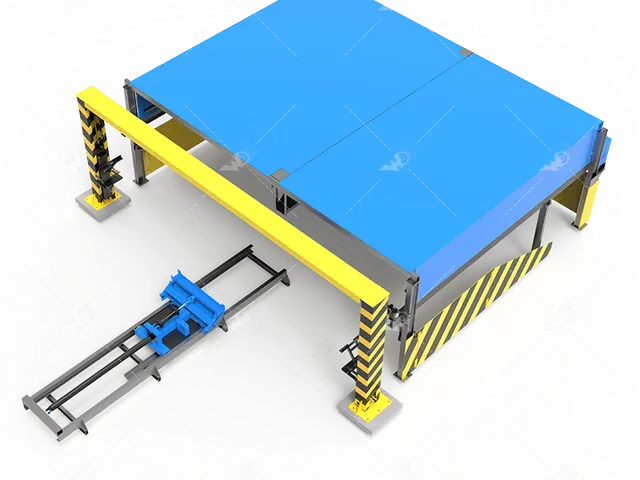
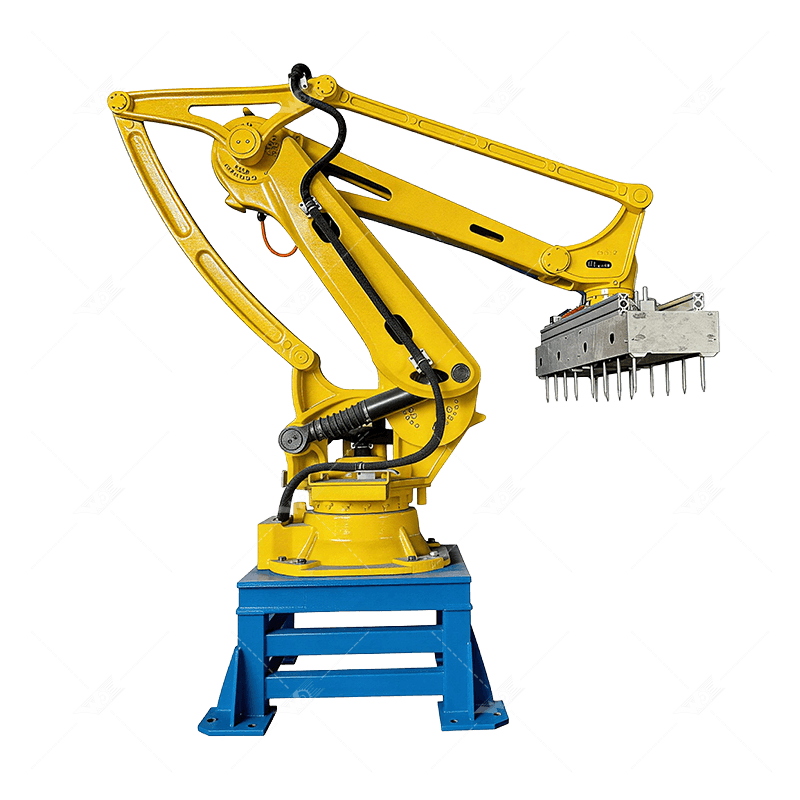
How It Works: Model JBX-2 uses a 4-axis joint design. Unlike single-function custom machines, this robotic arm can be flexibly programmed and fitted with different end effectors to be independently deployed in various scenarios such as trolley unloading, box loading, or palletizing.
Typical Users: Medium and large TSR processing enterprises facing labor shortages or seeking to control costs through phased automation upgrades.
Product Advantages
Multi-Scenario Adaptation: By reprogramming and changing end effectors, this robotic arm seamlessly switches between unloading, packing, and palletizing roles. Customers can deploy it where labor is most needed, ensuring high asset utilization.
Powerful Payload & Reach: With a 180 kg payload and over 3.2m working radius, a single unit can cover wide palletizing areas at the end of the line, eliminating safety hazards and health risks associated with manual handling of heavy loads.
Industrial Reliability: Backed by Weida's 20 years of technical expertise, the 4-axis structure is streamlined and robust. Core components are reinforced for high-temperature and dusty workshop environments to ensure long-term stable operation.
Applicable Materials
Technically Specified Rubber (TSR), Natural Rubber (NR)
Application Scenarios
In a large-scale TSR plant automation project, three JBX-2 units were deployed: the first for automated unloading of hot rubber blocks from drying kilns; the second for repetitive packing into boxes; and the third for palletizing finished cartons. This configuration reduced labor in high-intensity roles by 80% and standardized the factory's logistics rhythm.
Technical Specifications
| Model | Number of Axes | Maximum Working Radius | Maximum Payload | Power |
|---|---|---|---|---|
| JBX-2 | 4 | 3,245.5 mm | 180 kg | 27.8 kW |